Sometimes we get lucky :)
Regards
TK
WOW, you're good at this stuff!!
That worked perfectly.
Thank you,
David.
On 4/28/2017 2:57 PM, Tom
Kerekes tk@...
[DynoMotion] wrote:
Hi David,
Have you tried reversing
the positive and negative limits?
Regards
TK
Hi Tom,
I thought this machine was good to go but I
discovered there is a problem with the limit
switches and how the regular KMCNC software
handles them. Since things are running in
reverse, the slide is able to run past the
limit switch without triggering a stop. If I
creep into the limit by jogging (for testing)
I cannot back out because the software thinks
I'm moving farther into the limit. Hope that
makes sense. On that note, it seems the "Stop
Movement" and "Disallow Movement Into Limit"
seem to be switched, as the functionality of
each are reversed according to the "help"
instructions.
Thanks in advance,
David.
On 3/20/2017 5:20 PM,
David Stevenson wrote:
Hi Tom,
Today I downloaded and installed 434h and your
modified DLL and it works perfectly. Thanks
for that.
Before I did that I tried reversing the axis
directions with the APF routine, but the
motors will not run in the opposite direction.
I tried changing speed and accel values in the
initialization file, PID setiings and anything
else I could think of but the result was
always the motors thumping and faulting. I
guess I'm missing something with this, but at
least the KMCNC MDI window is working as
expected with the new DLL.
Thanks again,
David.
On 3/19/2017 9:48
PM, David Stevenson wrote:
Hi Tom,
Thank you very much for your help with this.
I will try both this and the patch you wrote
tomorrow morning. I expect you mean one or
the other, but I will give both a try.
Best regards,
David.
On 3/19/2017 8:15
PM, Tom Kerekes tk@...
[DynoMotion] wrote:
Hi David,
To make a servo work the opposite
direction both the output drive and the
feedback needs to be reversed to
maintain negative feedback.
The feedback can be reversed by
changing the sign of the InputGain0.
The output drive can be reversed by
changing the commutation.
The simplest way to determine the new
commutation is to use AutoPhaseFind.c and
change the line:
#define ENCODER_GAIN 1 // Set to -1
if desired to reverse axis direction
HTH
Regards
TK
Hi Tom,
The axis are 3ph brushless Hudson
servo motors (from Teknic) with
SnapAmp control.
Thanks,
David.
On
3/19/2017 5:42 PM, Tom Kerekes tk@...
[DynoMotion] wrote:
Hi David,
What kind of axis is it?
Regards
TK
Hi
Tom,
That's perfect... thank
you.
I have been trying to
reverse the 2 axis today
by changing the gain
values in the
initialization file, but
the motors thump around
and I can't seem to settle
them down. Is there
another way to reverse
them before getting to
KMotionCNC?
Thanks,
David.
On
3/19/2017 5:16 PM, Tom
Kerekes tk@... [DynoMotion]
wrote:
Hi David,
From:
http://dynomotion.com/Help/SchematicsSnap/UsingSnapAmp.htm
A
single SnapAmp
adds four
Quadrature Encoder
inputs. The four
Quadrature Encoder
inputs are
identified as
8,9,10,11 for the
first SnapAmp in a
system and
12,13,14,15 for a
second SnapAmp in
a system.
Regards
TK
Hi
Tom,
Could you please
point me to a
listing of which
input channels are
correlated to the
various encoder
inputs for
Kflop/Snapamp? I
found it months
ago by accident
but haven't been
able to locate it
since.
Thanks,
David.
On
3/18/2017 6:04 PM,
Tom Kerekes tk@... [DynoMotion]
wrote:
Hi David,
The Libraries
used by
KMotionCNC are
assuming
positive
Trajectory
Planner Axis
Resolution
Parameters. I
suppose they
should be able
to handle
negative
directions but
it would
complicate
things.
Please reverse
the Axis
directions in
your KFLOP
Configuration so
as to have
positive
resolutions
values.
Regards
TK
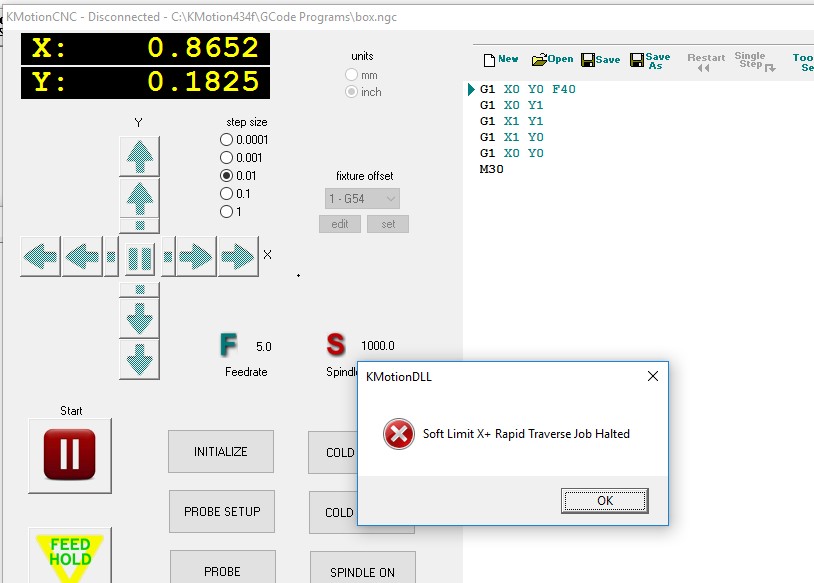
The
machine
coordinates
are shown in
the picture...
with the move
the max should
still be far
away. Are
there some
other machine
coordinates
I'm missing?
Thanks,
David.
Check the
machines
coordinates,
they probably
exceeded the
soft limit.

|
This email has
been checked
for viruses by
Avast
antivirus
software.
www.avast.com
|
|
|
This email has
been checked
for viruses by
Avast
antivirus
software.
www.avast.com
|
|
|
This email has been
checked for viruses
by Avast antivirus
software.
www.avast.com
|
|
|
This email has been checked
for viruses by Avast
antivirus software.
www.avast.com
|
|
|




{kind=link}